Epson机器人有码垛设置指令和使用指令,具体如下:
1. 设定码垛号,设定一层码垛4个角点位置,设定两个方向个数,自动计算所有码垛位置
2. 使用时,只需要输入第几个码垛序号,自动获取码垛位置
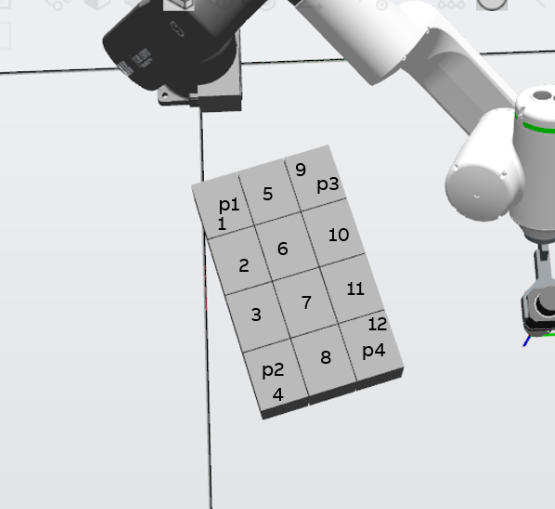
为便于有使用Epson机器人经验的客户转换,也方便其他使用ABB机器人的客户快速完成类似码垛,客户可以使用以下代码: 1. palletSet:设定码垛工艺号(支持1-10),示教垛型4个角点(按照下图的p1,p2,p3,p4,p2是第一个方向末端点,p3是第二个方向末端点,p4是最远点)。输入每个方向个数 2. palletGet(码垛号,产品序号) 获取码垛位置