

一、爱普生机器人 + 导轨 怎么连接(核心 3 部分)
1. 电气连接(最关键)
控制器扩展模块
爱普生 RC90、RC180、RC320 都支持第 7 轴扩展
导轨伺服 → 直接接机器人控制器
通讯方式
EtherCAT(最稳、最快)
或 爱普生专用伺服总线
供电
控制器 → 导轨伺服驱动器
导轨电机动力线、编码器线
安全互锁
急停串联
左右限位(硬限位 + 原点传感器)
伺服使能互锁
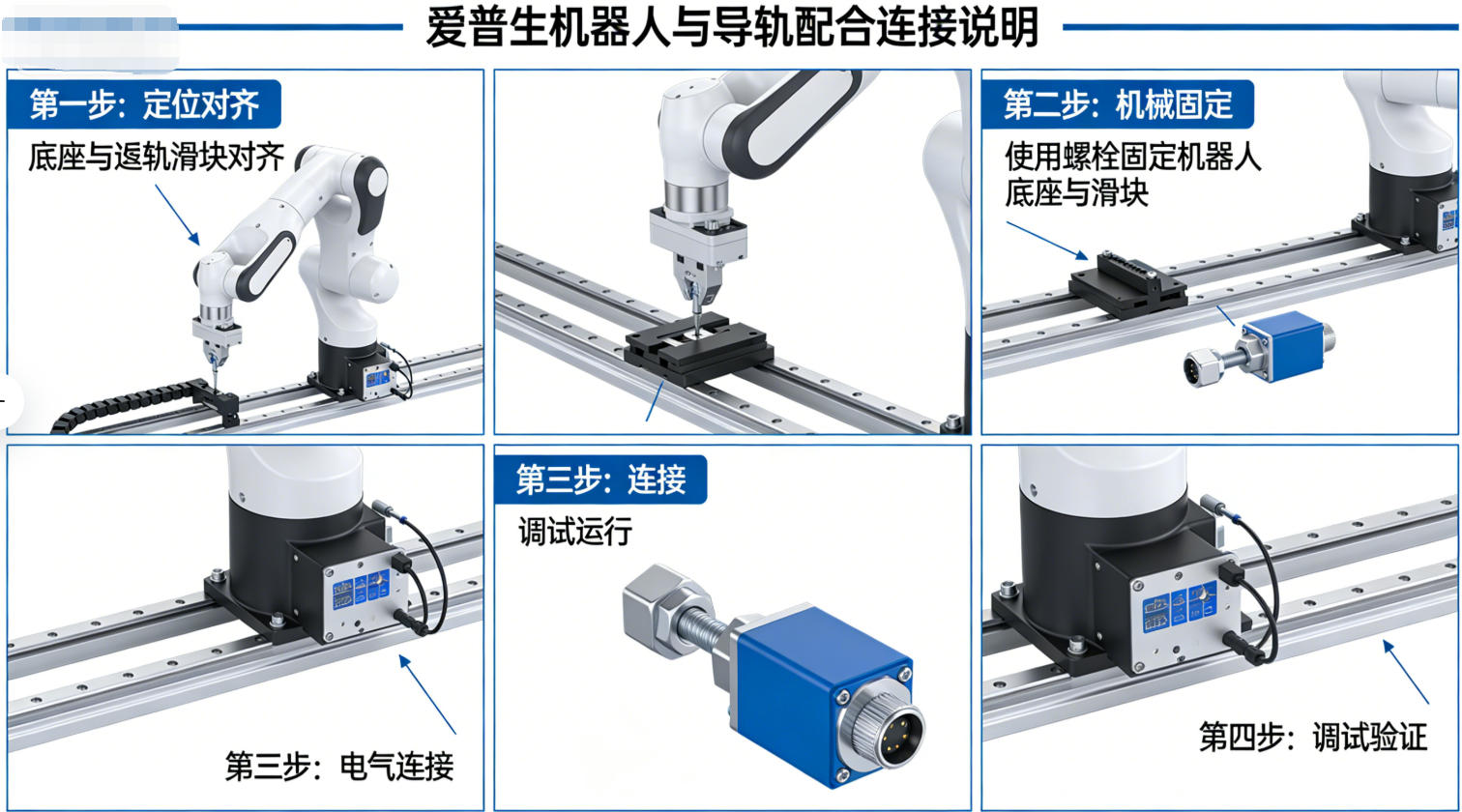
2. 机械安装
机器人底座固定在滑台上
导轨:方轨 / 重载导轨
传动:
滚珠丝杠(高精度)
齿条齿轮(长行程)
必须做:
水平校正
刚性加固
电缆拖链
3. 软件与控制配合
在 EPSON RC+ 里
开启 7th Axis 第 7 轴功能
设定:行程、减速比、脉冲、限位
做标定
原点校准
机器人与导轨坐标系绑定
两种运动模式
单独动:导轨走,机器人不动
协调联动:机器人 + 导轨同时插补运动
二、爱普生机器人 + 导轨 标准示意图(文字工程图)
plaintext
[ 爱普生机器人 (SCARA / 六轴) ] │ ▼ ┌───────────────────────────────────────────┐ │ 直线滑台导轨 │ └───────────────┬───────────────┬───────────┘ │ │ 动力线 + 编码器线 限位/原点/安全信号 │ │ ┌───────────────▼───────────────▼───────────┐ │ 爱普生控制器 (RC90/RC180) │ └───────────────────────────────────────────┘ │ EtherCAT 总线 / 第7轴驱动
